18 KiB
| title | teaser | menu | next | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Layers and Model Architectures | Power spaCy components with custom neural networks |
|
/usage/projects |
Example
from thinc.api import Model, chain @spacy.registry.architectures.register("model.v1") def build_model(width: int, classes: int) -> Model: tok2vec = build_tok2vec(width) output_layer = build_output_layer(width, classes) model = chain(tok2vec, output_layer) return model
A model architecture is a function that wires up a
Thinc Model instance. It describes the
neural network that is run internally as part of a component in a spaCy
pipeline. To define the actual architecture, you can implement your logic in
Thinc directly, or you can use Thinc as a thin wrapper around frameworks such as
PyTorch, TensorFlow and MXNet. Each Model can also be used as a sublayer of a
larger network, allowing you to freely combine implementations from different
frameworks into a single model.
spaCy's built-in components require a Model instance to be passed to them via
the config system. To change the model architecture of an existing component,
you just need to update the config so that it refers
to a different registered function. Once the component has been created from
this config, you won't be able to change it anymore. The architecture is like a
recipe for the network, and you can't change the recipe once the dish has
already been prepared. You have to make a new one.
### config.cfg (excerpt)
[components.tagger]
factory = "tagger"
[components.tagger.model]
@architectures = "model.v1"
width = 512
classes = 16
Type signatures
Example
from typing import List from thinc.api import Model, chain from thinc.types import Floats2d def chain_model( tok2vec: Model[List[Doc], List[Floats2d]], layer1: Model[List[Floats2d], Floats2d], layer2: Model[Floats2d, Floats2d] ) -> Model[List[Doc], Floats2d]: model = chain(tok2vec, layer1, layer2) return model
The Thinc Model class is a generic type that can specify its input and
output types. Python uses a square-bracket notation for this, so the type
Model[List, Dict] says that each batch of inputs to the model will be a
list, and the outputs will be a dictionary. You can be even more specific and
write for instanceModel[List[Doc], Dict[str, float]] to specify that the
model expects a list of Doc objects as input, and returns a
dictionary mapping of strings to floats. Some of the most common types you'll
see are:
| Type | Description |
|---|---|
A batch of Doc objects. Most components expect their models to take this as input. |
|
A two-dimensional numpy or cupy array of floats. Usually 32-bit. |
|
A two-dimensional numpy or cupy array of integers. Common dtypes include uint64, int32 and int8. |
|
A list of two-dimensional arrays, generally with one array per Doc and one row per token. |
|
| A container to handle variable-length sequence data in an unpadded contiguous array. | |
| A container to handle variable-length sequence data in a padded contiguous array. |
The model type signatures help you figure out which model architectures and
components can fit together. For instance, the
TextCategorizer class expects a model typed
Model[List[Doc], Floats2d], because the model will predict one row of
category probabilities per Doc. In contrast, the
Tagger class expects a model typed Model[List[Doc],
List[Floats2d]], because it needs to predict one row of probabilities per
token.
There's no guarantee that two models with the same type signature can be used interchangeably. There are many other ways they could be incompatible. However, if the types don't match, they almost surely won't be compatible. This little bit of validation goes a long way, especially if you configure your editor or other tools to highlight these errors early. The config file is also validated at the beginning of training, to verify that all the types match correctly.
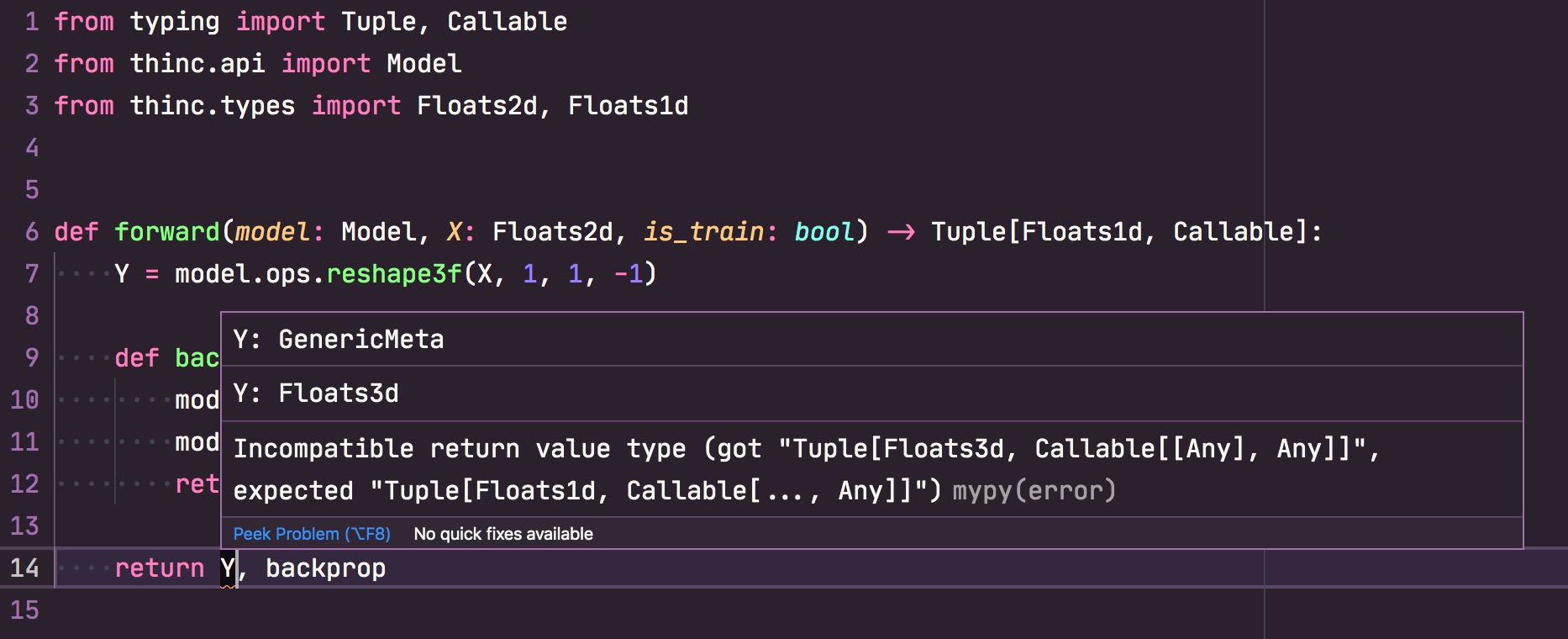
If you're using a modern editor like Visual Studio Code, you can
set up mypy with the
custom Thinc plugin and get live feedback about mismatched types as you write
code.
Swapping model architectures
If no model is specified for the TextCategorizer, the
TextCatEnsemble architecture is used by
default. This architecture combines a simple bag-of-words model with a neural
network, usually resulting in the most accurate results, but at the cost of
speed. The config file for this model would look something like this:
### config.cfg (excerpt)
[components.textcat]
factory = "textcat"
labels = []
[components.textcat.model]
@architectures = "spacy.TextCatEnsemble.v1"
exclusive_classes = false
pretrained_vectors = null
width = 64
conv_depth = 2
embed_size = 2000
window_size = 1
ngram_size = 1
dropout = 0
nO = null
spaCy has two additional built-in textcat architectures, and you can easily
use those by swapping out the definition of the textcat's model. For instance,
to use the simple and fast bag-of-words model
TextCatBOW, you can change the config to:
### config.cfg (excerpt) {highlight="6-10"}
[components.textcat]
factory = "textcat"
labels = []
[components.textcat.model]
@architectures = "spacy.TextCatBOW.v1"
exclusive_classes = false
ngram_size = 1
no_output_layer = false
nO = null
For details on all pre-defined architectures shipped with spaCy and how to configure them, check out the model architectures documentation.
Defining sublayers
Model architecture functions often accept sublayers as arguments, so that you can try substituting a different layer into the network. Depending on how the architecture function is structured, you might be able to define your network structure entirely through the config system, using layers that have already been defined.
In most neural network models for NLP, the most important parts of the network
are what we refer to as the
embed and encode steps.
These steps together compute dense, context-sensitive representations of the
tokens, and their combination forms a typical
Tok2Vec layer:
### config.cfg (excerpt)
[components.tok2vec]
factory = "tok2vec"
[components.tok2vec.model]
@architectures = "spacy.Tok2Vec.v1"
[components.tok2vec.model.embed]
@architectures = "spacy.MultiHashEmbed.v1"
# ...
[components.tok2vec.model.encode]
@architectures = "spacy.MaxoutWindowEncoder.v1"
# ...
By defining these sublayers specifically, it becomes straightforward to swap out a sublayer for another one, for instance changing the first sublayer to a character embedding with the CharacterEmbed architecture:
### config.cfg (excerpt)
[components.tok2vec.model.embed]
@architectures = "spacy.CharacterEmbed.v1"
# ...
[components.tok2vec.model.encode]
@architectures = "spacy.MaxoutWindowEncoder.v1"
# ...
Most of spaCy's default architectures accept a tok2vec layer as a sublayer
within the larger task-specific neural network. This makes it easy to switch
between transformer, CNN, BiLSTM or other feature extraction approaches. The
transformers documentation
section shows an example of swapping out a model's standard tok2vec layer with
a transformer. And if you want to define your own solution, all you need to do
is register a Model[List[Doc], List[Floats2d]] architecture function, and
you'll be able to try it out in any of the spaCy components.
Wrapping PyTorch, TensorFlow and other frameworks
Thinc allows you to wrap models
written in other machine learning frameworks like PyTorch, TensorFlow and MXNet
using a unified Model API. This makes it
easy to use a model implemented in a different framework to power a component in
your spaCy pipeline. For example, to wrap a PyTorch model as a Thinc Model,
you can use Thinc's
PyTorchWrapper:
from thinc.api import PyTorchWrapper
wrapped_pt_model = PyTorchWrapper(torch_model)
Let's use PyTorch to define a very simple neural network consisting of two
hidden Linear layers with ReLU activation and dropout, and a
softmax-activated output layer:
### PyTorch model
from torch import nn
torch_model = nn.Sequential(
nn.Linear(width, hidden_width),
nn.ReLU(),
nn.Dropout2d(dropout),
nn.Linear(hidden_width, nO),
nn.ReLU(),
nn.Dropout2d(dropout),
nn.Softmax(dim=1)
)
The resulting wrapped Model can be used as a custom architecture as such,
or can be a subcomponent of a larger model. For instance, we can use Thinc's
chain combinator, which works like
Sequential in PyTorch, to combine the wrapped model with other components in a
larger network. This effectively means that you can easily wrap different
components from different frameworks, and "glue" them together with Thinc:
from thinc.api import chain, with_array, PyTorchWrapper
from spacy.ml import CharacterEmbed
wrapped_pt_model = PyTorchWrapper(torch_model)
char_embed = CharacterEmbed(width, embed_size, nM, nC)
model = chain(char_embed, with_array(wrapped_pt_model))
In the above example, we have combined our custom PyTorch model with a character
embedding layer defined by spaCy.
CharacterEmbed returns a Model that takes
a List[Doc] as input, and outputs a List[Floats2d]. To make sure that
the wrapped PyTorch model receives valid inputs, we use Thinc's
with_array helper.
You could also implement a model that only uses PyTorch for the transformer layers, and "native" Thinc layers to do fiddly input and output transformations and add on task-specific "heads", as efficiency is less of a consideration for those parts of the network.
Using wrapped models
To use our custom model including the PyTorch subnetwork, all we need to do is
register the architecture using the
architectures registry. This will assign the
architecture a name so spaCy knows how to find it, and allows passing in
arguments like hyperparameters via the config. The
full example then becomes:
### Registering the architecture {highlight="9"}
from typing import List
from thinc.types import Floats2d
from thinc.api import Model, PyTorchWrapper, chain, with_array
import spacy
from spacy.tokens.doc import Doc
from spacy.ml import CharacterEmbed
from torch import nn
@spacy.registry.architectures("CustomTorchModel.v1")
def create_torch_model(
nO: int,
width: int,
hidden_width: int,
embed_size: int,
nM: int,
nC: int,
dropout: float,
) -> Model[List[Doc], List[Floats2d]]:
char_embed = CharacterEmbed(width, embed_size, nM, nC)
torch_model = nn.Sequential(
nn.Linear(width, hidden_width),
nn.ReLU(),
nn.Dropout2d(dropout),
nn.Linear(hidden_width, nO),
nn.ReLU(),
nn.Dropout2d(dropout),
nn.Softmax(dim=1)
)
wrapped_pt_model = PyTorchWrapper(torch_model)
model = chain(char_embed, with_array(wrapped_pt_model))
return model
The model definition can now be used in any existing trainable spaCy component, by specifying it in the config file. In this configuration, all required parameters for the various subcomponents of the custom architecture are passed in as settings via the config.
### config.cfg (excerpt) {highlight="5-5"}
[components.tagger]
factory = "tagger"
[components.tagger.model]
@architectures = "CustomTorchModel.v1"
nO = 50
width = 96
hidden_width = 48
embed_size = 2000
nM = 64
nC = 8
dropout = 0.2
Remember that it is best not to rely on any (hidden) default values to ensure that training configs are complete and experiments fully reproducible.
Custom models with Thinc
Of course it's also possible to define the Model from the previous section
entirely in Thinc. The Thinc documentation provides details on the
various layers and helper functions
available. Combinators can also be used to
overload operators and a common
usage pattern is to bind chain to >>. The "native" Thinc version of our
simple neural network would then become:
from thinc.api import chain, with_array, Model, Relu, Dropout, Softmax
from spacy.ml import CharacterEmbed
char_embed = CharacterEmbed(width, embed_size, nM, nC)
with Model.define_operators({">>": chain}):
layers = (
Relu(hidden_width, width)
>> Dropout(dropout)
>> Relu(hidden_width, hidden_width)
>> Dropout(dropout)
>> Softmax(nO, hidden_width)
)
model = char_embed >> with_array(layers)
Note that Thinc layers define the output dimension (nO) as the first argument,
followed (optionally) by the input dimension (nI). This is in contrast to how
the PyTorch layers are defined, where in_features precedes out_features.
Shape inference in Thinc
It is not strictly necessary to define all the input and output dimensions
for each layer, as Thinc can perform
shape inference between
sequential layers by matching up the output dimensionality of one layer to the
input dimensionality of the next. This means that we can simplify the layers
definition:
Diff
layers = ( Relu(hidden_width, width) >> Dropout(dropout) - >> Relu(hidden_width, hidden_width) + >> Relu(hidden_width) >> Dropout(dropout) - >> Softmax(nO, hidden_width) + >> Softmax(nO) )
with Model.define_operators({">>": chain}):
layers = (
Relu(hidden_width, width)
>> Dropout(dropout)
>> Relu(hidden_width)
>> Dropout(dropout)
>> Softmax(nO)
)
Thinc can even go one step further and deduce the correct input dimension of
the first layer, and output dimension of the last. To enable this functionality,
you have to call
Model.initialize with an input
sample X and an output sample Y with the correct dimensions:
### Shape inference with initialization {highlight="3,7,10"}
with Model.define_operators({">>": chain}):
layers = (
Relu(hidden_width)
>> Dropout(dropout)
>> Relu(hidden_width)
>> Dropout(dropout)
>> Softmax()
)
model = char_embed >> with_array(layers)
model.initialize(X=input_sample, Y=output_sample)
The built-in pipeline components in spaCy ensure
that their internal models are always initialized with appropriate sample
data. In this case, X is typically a List[Doc], while Y is typically a
List[Array1d] or List[Array2d], depending on the specific task. This
functionality is triggered when
nlp.begin_training is called.
Dropout and normalization in Thinc
Many of the available Thinc layers allow you
to define a dropout argument that will result in "chaining" an additional
Dropout layer. Optionally, you can
often specify whether or not you want to add layer normalization, which would
result in an additional
LayerNorm layer. That means that
the following layers definition is equivalent to the previous:
with Model.define_operators({">>": chain}):
layers = (
Relu(hidden_width, dropout=dropout, normalize=False)
>> Relu(hidden_width, dropout=dropout, normalize=False)
>> Softmax()
)
model = char_embed >> with_array(layers)
model.initialize(X=input_sample, Y=output_sample)