|
|
||
|---|---|---|
| .. | ||
| rl | ||
| README.md | ||
| requirements.txt | ||
| train_fabric.py | ||
| train_fabric_decoupled.py | ||
| train_torch.py | ||
README.md
Proximal Policy Optimization - PPO implementation powered by Lightning Fabric
This is an example of a Reinforcement Learning algorithm called Proximal Policy Optimization (PPO) implemented in PyTorch and accelerated by Lightning Fabric.
The goal of Reinforcement Learning is to train agents to act in their surrounding environment maximizing the cumulative reward received from it. This can be depicted in the following figure:
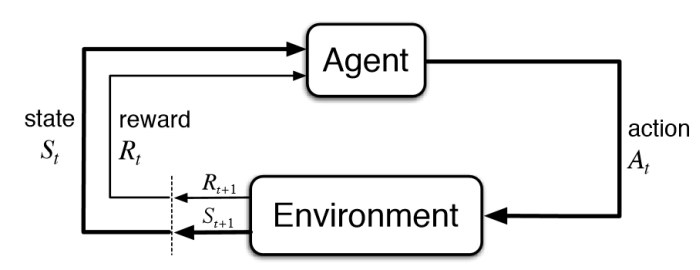
PPO is one of such algorithms, which alternates between sampling data through interaction with the environment, and optimizing a “surrogate” objective function using stochastic gradient ascent.
Requirements
Install requirements by running
pip install -r requirements.txt
Example 1 - Environment coupled with the agent
In this example we present two code versions: the first one is implemented in raw PyTorch, but it contains quite a bit of boilerplate code for distributed training. The second one is using Lightning Fabric to accelerate and scale the model.
The main architecture is the following:
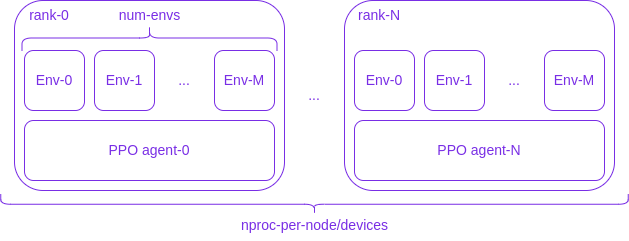
where N+1 processes (labelled rank-0, ..., rank-N in the figure above) will be spawned by Fabric/PyTorch, each of them running M+1 independent copies of the environment (Env-0, ..., Env-M). Every rank has its own copy of the agent, represented by a LightningModule/PyTorch Module, which will be updated through distributed training.
Raw PyTorch:
torchrun --nproc_per_node=2 --standalone train_torch.py
Lightning Fabric:
fabric run --accelerator=cpu --strategy=ddp --devices=2 train_fabric.py
Visualizing logs
You can visualize training and test logs by running:
tensorboard --logdir logs
Under the logs folder you should find two folders:
logs/torch_logslogs/fabric_logs
If you have run the experiment with the --capture-video you should find the train_videos and test_videos folders under the specific experiment folder.
Results
The following video shows a trained agent on the LunarLander-v2 environment.
The agent was trained with the following:
fabric run \
--accelerator=cpu \
--strategy=ddp \
--devices=2 \
train_fabric.py \
--capture-video \
--env-id LunarLander-v2 \
--total-timesteps 500000 \
--ortho-init \
--num-envs 2 \
--num-steps 2048 \
--seed 1
Example 2 - Environment decoupled from the agent
In this example we have gone even further leveraging the flexibility offered by Fabric. The architecture is depicted in the following figure:
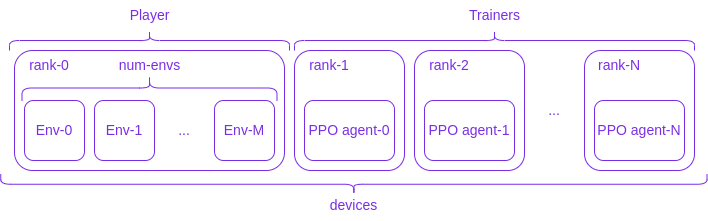
where, differently from the previous example, we have completely decoupled the environment from the agents: the rank-0 process will be regarded as the Player, which runs M+1 independent copies of the environment (Env-0, ..., Env-M); the rank-1, ..., rank-N are the Trainers, which contain the agent to be optimized. Player and Trainer share data through collectives and thanks to Fabric's flexibility we can run Player and Trainers on different devices.
So for example:
fabric run --devices=3 train_fabric_decoupled.py --num-envs 4
will spawn 3 processes, one is the Player and the others the Trainers, with the Player running 4 independent environments, where every process runs on the CPU;
fabric run --devices=3 train_fabric_decoupled.py --num-envs 4 --cuda
will instead run only the Trainers on the GPU.
If one wants to run both the Player and the Trainers on the GPU, then both the flags --cuda and --player-on-gpu must be provided:
fabric run --devices=3 train_fabric_decoupled.py --num-envs 4 --cuda --player-on-gpu
Warning
With this second example, there is no need for the user to provide the
acceleratorand thestrategyto thefabric runscript.
Number of updates, environment steps and share data
In every one of the examples above, one has that:
- The number of total updates will be given by
args.total_timesteps / args.num_steps args.num_stepsis the number of environment interactions before the agent training step, i.e. the agent gathersargs.num_stepsexperiences and uses them to update itself during the training stepargs.share_datacontrols how the data is shared between processes. In particular:- In the first example, if
args.share_datais set then every process will have access at the data gathered by all the other processes, effectively calling the all_gather distributed function. In this way, during the training step, the agents can employ the standard PyTorch distributed training recipe, where one can assume that before the training starts every process sees the same data, and trains the model on a disjoint subset (from process to process) of it. Otherwise, ifargs.share_datais not set (the default), then every process will update the model with its own local data - In the second example, when
args.share_datais set then one has the same behaviour of the first example. Instead, whenargs.share_datais not set then the player scatters an almost-equal-sized subset of the collected experiences to the trainers, effectively calling the scatter distributed function
- In the first example, if